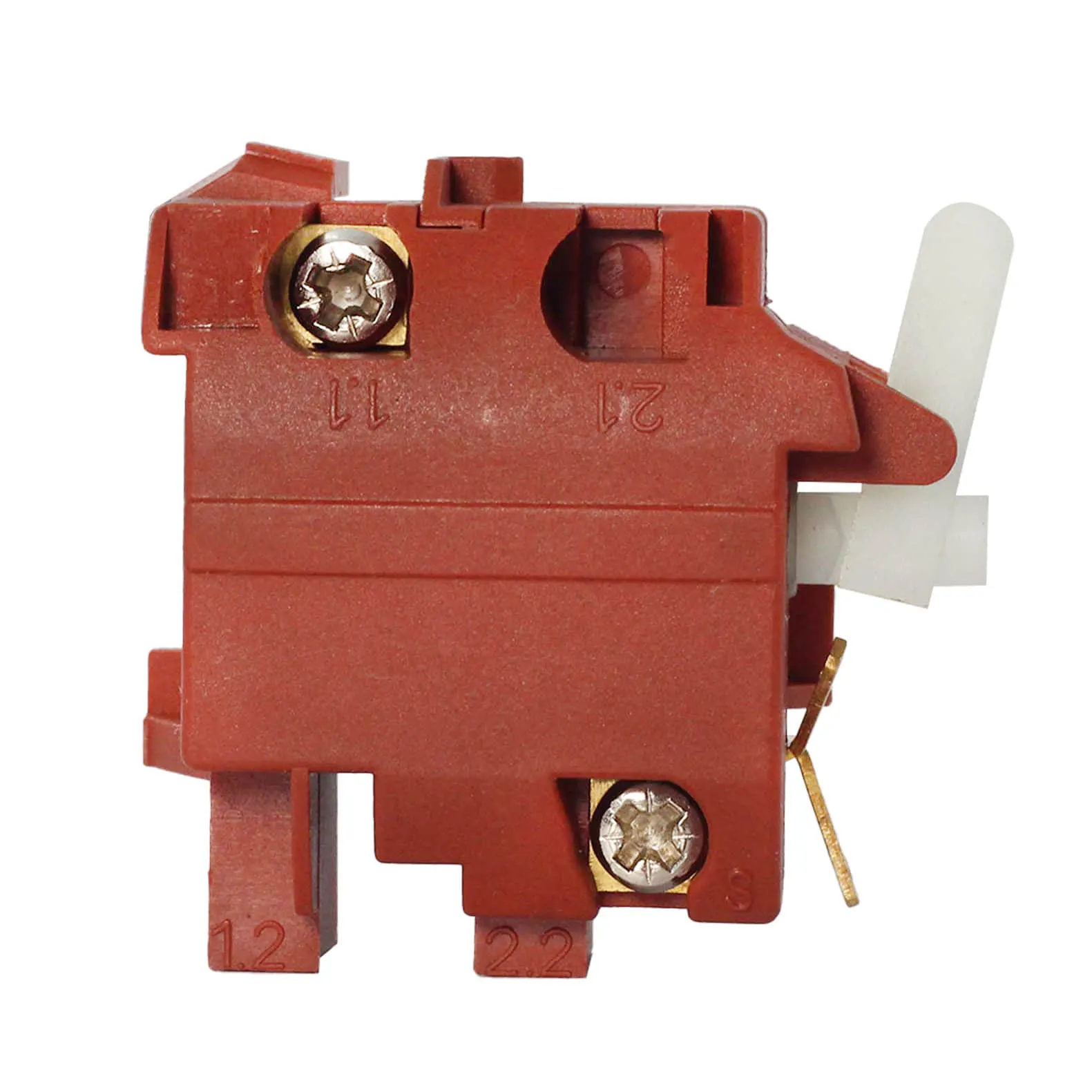
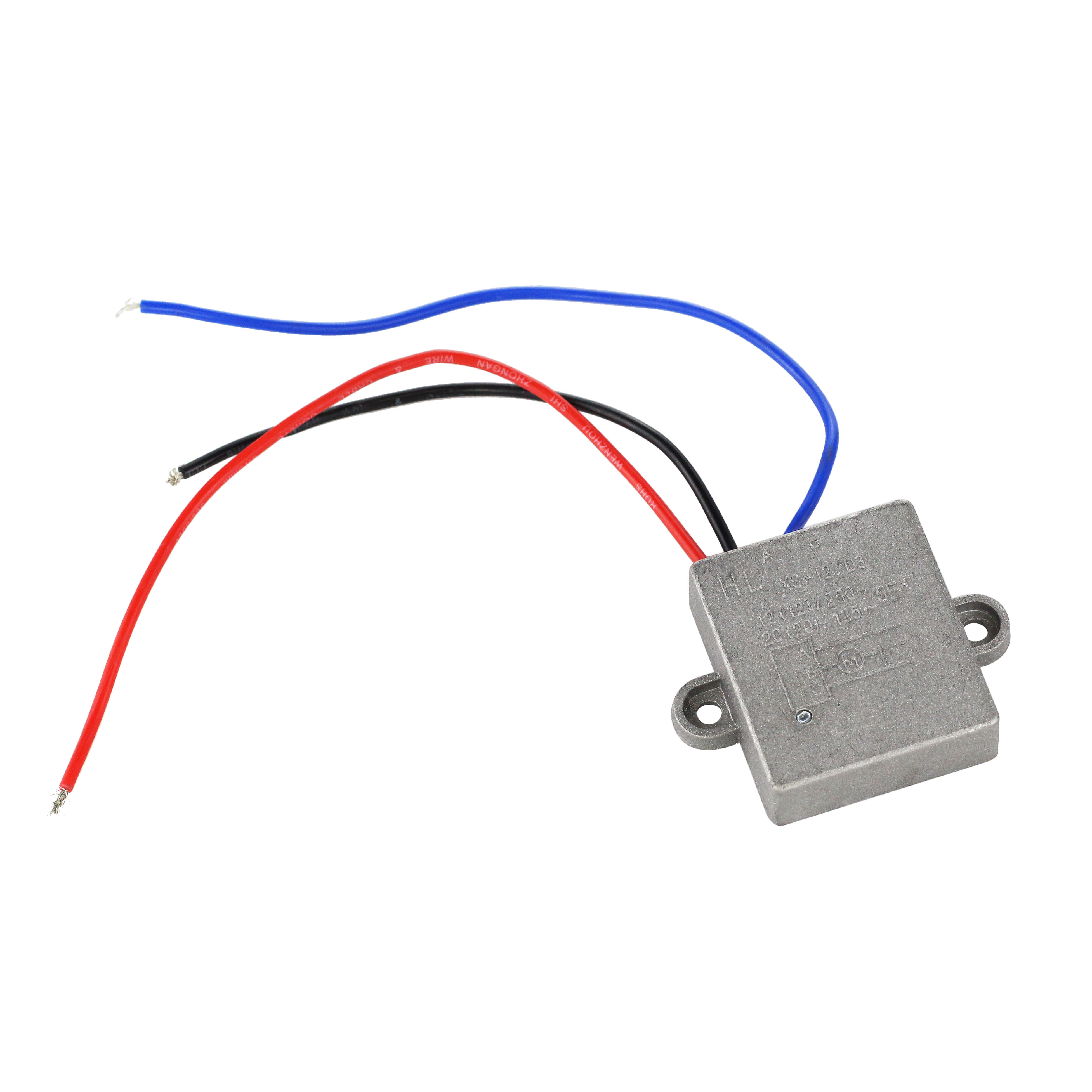
ხელოვნური ჩაქვაბის გადართვილი
Რეკავის გადამრთველი არის გარკვეული კომპონენტი, რომელიც მართავს ძალაში მუშაობის ფუნქციონალობას, საშუალებას ძლევს მომხმარებლებს ეფექტურად მართავინა სიჩქარე, მიმართულება და ძალა. ეს სოფისტიკირებული მექანიზმი შეიძლება დარწმუნებულობას შეერთოს ზუსტი ინჟინრისტიკის სანამ, რომელიც შეიცავს ცვლადი სიჩქარის კონტროლს, რომელიც განსაზღვრულია წნევის გამოყენებით, შესაძლებლობას ძლევს ზუსტი გამოსავალის მართვას რეკავის მუშაობისას. ახალი რეკავის გადამრთველები შეიცავს განვითარებულ სამართლეს, მათ შორის გამატების დაცულებას და ელექტრონულ გამორთვის სისტემებს, რაც უზრუნველყოფს მომხმარებლის სამართლეს და იнструმენტის გრძელი გამოყენებას. გადამრთველის მექანიზმი ჩვეულებრივ შედგება ტრიგერის კომპლექსიდან, სიჩქარის კონტროლის მოდულიდან და მიმართულების კონტროლიდან, ყველა ერგონომიკურად ინტეგრირებული რეკავის მარშრუტში. ეს გადამრთველები შექმნილია ხშირი გამოყენებისა და მკაცრი პირობების გამოსადგენად, დახურული კომპონენტებით, რომლებიც წარმოადგენენ пыლებისა და დებრის შესასვლელს. ამ გადამრთველების უკანასკნელი ტექნოლოგია შეიცავს მახასიათებელებს, როგორიცაა მỀრი დაწყება, რომელიც შემცირებს საწყის ტორქ-ს უკეთესი კონტროლისთვის, და ელექტრონული სიჩქარის მართვის სისტემები, რომლებიც დახმარება მუშაობის მუდმივი რpz-ების მართვაში განსხვავებულ მუშაობის პირობებში.